|
|
|||||||
|
|||||||

|
|
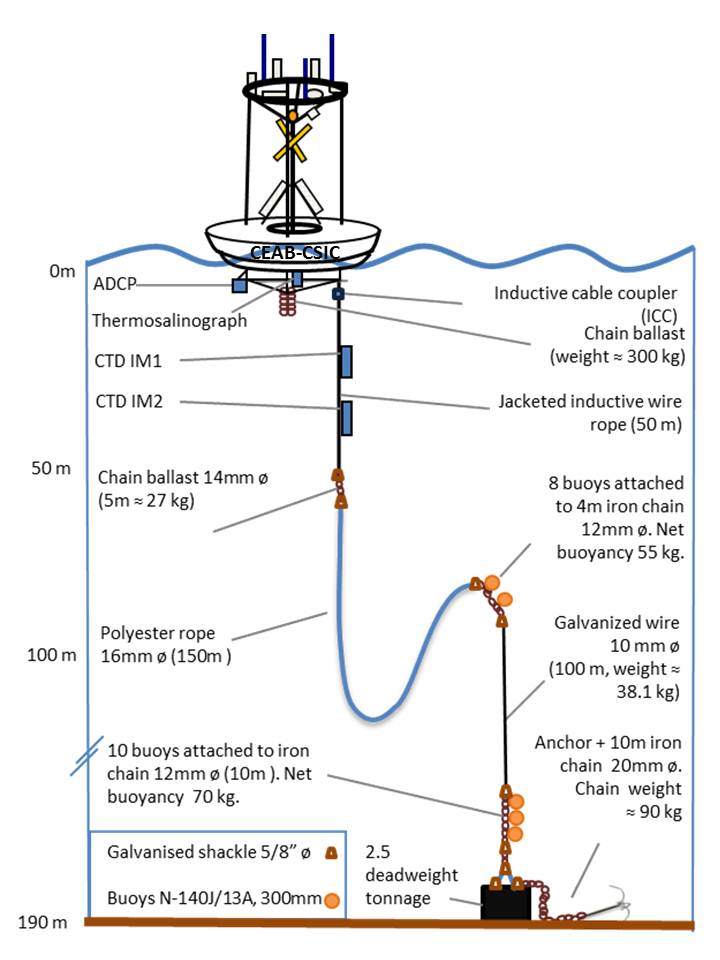
For detailed description of the platform structure and funcioning click here (pdf format) The present mooring line configuration (2011) consists of 50 m inductive cable connecting the float to the mooring line which is turn is connected to a dead weight at 192 m depth with polyester rope and galvanised cable. Two packs of sensors (CTD/PAR/DO/TUR/FLU) are attached to the inductive cable at 26 and 47 m depth. The buoy is anchored in a location (2.7 miles away from the coast) well covered by MOVISTAR mobile telephone service. The GPS position is transmitted via data call every 30 min. Up to the present, the system has been operating satisfactorily. In 2003, the platform was equipped with an ARGOS positioning system. The positioning system failed to provide the buoy position when the mooring line was broken. For the mooring deployed in September 2009 the ARGOS surveillance system was tested. However, during the period lapsed since the serviced was requested until obtaining a positive response, the mooring line was broken (by a ghost vessel) again and recovered with no positioning ARGOS system. We finally decided not to use the ARGOS surveillance system. We also tried GPS-GLOBALSTAR positioning system. After several trials, the system failed to provide a 1km security ratio. So, we stopped doing more trials. |
||||||||||||||||